第12章:异常处理与恢复
为了使智能体能够在多样的现实世界环境中可靠地运行,它们必须能够处理不可预见的情况、错误和故障。正如人类适应意外障碍一样,智能体需要强大的系统来检测问题、启动恢复程序,或者至少确保可控的失败。这一基本要求构成了异常处理和恢复模式的基础。
本模式侧重于开发极其耐用和具有弹性的智能体,即使面临各种困难和异常,也能保持不间断的功能性和操作完整性。它强调主动准备和反应策略的重要性,以确保即使在面对挑战时也能持续运行。这种适应性对于智能体在复杂和不可预测的环境中成功运作至关重要,最终提升其整体有效性和可靠性。
处理意外事件的能力确保了这些人工智能系统不仅智能,而且稳定可靠,这增强了人们对它们部署和性能的信心。集成全面的监控和诊断工具进一步增强了智能体快速识别和解决问题的能力,防止潜在的中断,确保在变化的环境中运行更加顺畅。这些先进系统对于维护人工智能操作的完整性和效率至关重要,强化了它们管理复杂性和不确定性的能力。
这种模式有时可以与反射结合使用。例如,如果初次尝试失败并引发异常,反射过程可以分析失败原因,并采用改进的方法(如改进的提示)重新尝试任务,以解决错误。
异常处理和恢复模式概述
异常处理和恢复模式旨在解决AI智能体管理操作失败的需求。该模式涉及预测潜在问题,例如工具错误或服务不可用,并制定缓解策略。这些策略可能包括错误记录、重试、回退、优雅降级和通知。此外,该模式强调恢复机制,如状态回滚、诊断、自我纠正和升级,以恢复智能体的稳定运行。实施此模式可增强AI智能体的可靠性和鲁棒性,使其能够在不可预测的环境中运行。实际应用示例包括聊天机器人管理数据库错误、交易机器人处理金融错误以及智能家居智能体解决设备故障。该模式确保即使遇到复杂性和故障,智能体也能继续有效运行。
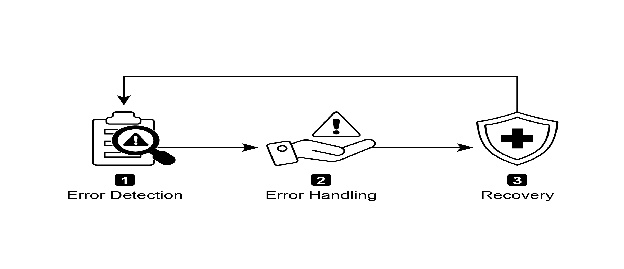
图1:AI智能体异常处理和恢复的关键组件
错误检测: 这涉及到细致地识别在出现时操作问题。这可能表现为无效或格式不正确的工具输出,特定的API错误,如404(未找到)或500(内部服务器错误)代码,服务或API响应时间异常长,或者与预期格式不符的不连贯和荒谬的响应。此外,其他智能体或专门的监控系统可能被实施以进行更主动的异常检测,使系统能够在问题升级之前捕捉到潜在的问题。
错误处理:一旦检测到错误,制定一个周密的响应计划至关重要。这包括在日志中详细记录错误信息,以便后续调试和分析(日志记录)。重试操作或请求,有时会稍微调整参数,可能是一种可行的策略,尤其是在处理短暂性错误时(重试)。利用替代策略或方法(回退)可以确保某些功能得以保持。在无法立即完全恢复的情况下,智能体可以维持部分功能,至少提供一些价值(优雅降级)。最后,对于需要人工干预或协作的情况,向人工操作员或其他智能体发出警报可能至关重要(通知)。
恢复: 此阶段涉及在发生错误后,将智能体或系统恢复到稳定和可操作的状态。这可能包括撤销最近的变化或事务,以取消错误的影响(状态回滚)。彻底调查错误的原因对于防止再次发生至关重要。可能需要通过自我校正机制或重新规划过程调整智能体的计划、逻辑或参数,以避免未来发生相同的错误。在复杂或严重的情况下,将问题委托给人工操作员或更高层次的系统(升级)可能是最佳行动方案。
实施这种强大的异常处理和恢复模式可以将AI智能体从脆弱且不可靠的系统转变为稳健、可靠的组件,使其能够在充满挑战和高度不可预测的环境中有效且弹性地运行。这确保了智能体即使在面临意外问题时也能保持功能,最小化停机时间,并提供无缝且可靠的体验。
实际应用与用例
异常处理和恢复对于在任何实际场景中部署的智能体至关重要,因为这些场景中无法保证完美条件。
- 客户服务聊天机器人: 如果聊天机器人尝试访问客户数据库,而数据库暂时不可用,它不应该崩溃。相反,它应该检测到API错误,通知用户关于临时问题的信息,或许建议稍后再尝试,或者将查询升级至人工智能体。
- 自动化金融交易:一个试图执行交易的交易机器人可能会遇到“资金不足”错误或“市场已关闭”错误。它需要通过记录错误、不反复尝试相同的无效交易,以及可能通知用户或调整其策略来处理这些异常。
- 智能家居自动化: 控制智能灯的智能体可能因网络问题或设备故障而无法打开灯光。它应该检测到这种故障,可能尝试重试,如果仍然失败,则通知用户灯光无法打开,并建议手动干预。
- 数据处理智能体: 被指派处理一批文档的智能体可能会遇到损坏的文件。它应该跳过损坏的文件,记录错误,继续处理其他文件,并在结束时报告跳过的文件,而不是使整个流程中断。
- 网页抓取智能体: 当网页抓取智能体遇到验证码、网站结构变更或服务器错误(例如,404页面未找到,503服务不可用)时,它需要优雅地处理这些情况。这可能包括暂停操作、使用代理或报告失败的特定URL。
- 机器人与制造: 一台执行组装任务的机械臂可能会因为定位不准确而无法抓取组件。它需要检测到这种故障(例如,通过传感器反馈),尝试重新调整,重试抓取,如果问题持续存在,则通知人工操作员或切换到不同的组件。
简而言之,这种模式对于构建既智能又可靠、具有弹性和用户友好的智能体至关重要,尤其是在面对现实世界的复杂性时。
动手代码示例(ADK)
异常处理和恢复对于系统的健壮性和可靠性至关重要。以智能体对失败的工具调用的响应为例。此类失败可能源于工具输入错误或工具所依赖的外部服务问题。
from google.adk.agents import Agent, SequentialAgent
# Agent 1: Tries the primary tool. Its focus is narrow and clear.
primary_handler = Agent(
name="primary_handler",
model="gemini-2.0-flash-exp",
instruction="""Your job is to get precise location information. Use the get_precise_location_info tool with the user's provided address.""",
tools=[get_precise_location_info]
)
# Agent 2: Acts as the fallback handler, checking state to decide its action.
fallback_handler = Agent(
name="fallback_handler",
model="gemini-2.0-flash-exp",
instruction="""Check if the primary location lookup failed by looking at state["primary_location_failed"]. - If it is True, extract the city from the user's original query and use the get_general_area_info tool. - If it is False, do nothing.""",
tools=[get_general_area_info]
)
# Agent 3: Presents the final result from the state.
response_agent = Agent(
name="response_agent",
model="gemini-2.0-flash-exp",
instruction="""Review the location information stored in state["location_result"]. Present this information clearly and concisely to the user. If state["location_result"] does not exist or is empty, apologize that you could not retrieve the location.""",
tools=[] # This agent only reasons over the final state.
)
# The SequentialAgent ensures the handlers run in a guaranteed order.
robust_location_agent = SequentialAgent(
name="robust_location_agent",
sub_agents=[primary_handler, fallback_handler, response_agent]
)
此代码定义了一个使用ADK的SequentialAgent和三个子智能体的鲁棒位置检索系统。primary_handler是第一个智能体,尝试使用get_precise_location_info工具获取精确的位置信息。fallback_handler充当备份,通过检查状态变量来确认主要查找是否失败。如果主要查找失败,后备智能体将从用户的查询中提取城市信息,并使用get_general_area_info工具。response_agent是序列中的最后一个智能体,它审查存储在状态中的位置信息。该智能体旨在向用户展示最终结果。如果没有找到位置信息,它会表示歉意。SequentialAgent确保这三个智能体按照预定义的顺序执行。这种结构允许采用分层方法进行位置信息检索。
概览
内容: 在现实世界环境中运行的AI智能体不可避免地会遇到不可预见的情况、错误和系统故障。这些问题可能包括工具故障和网络问题,甚至无效数据,这些都威胁到智能体完成任务的能力。如果没有一种结构化的方式来管理这些问题,智能体可能会变得脆弱、不可靠,并在面对意外障碍时完全失败。这种不可靠性使得它们难以部署到需要一致性能的关键或复杂应用中。
原因:异常处理和恢复模式为构建强大且具有弹性的AI智能体提供了一个标准化的解决方案。它使智能体具备预见、管理和从操作故障中恢复的能力。该模式包括主动错误检测,如监控工具输出和API响应,以及反应式处理策略,如记录诊断信息、重试短暂故障或使用回退机制。对于更严重的问题,它定义了恢复协议,包括恢复到稳定状态、通过调整其计划进行自我纠正,或将问题升级给人工操作员。这种系统化的方法确保智能体能够保持操作完整性,从故障中学习,并在不可预测的环境中可靠地运行。
经验法则: 在任何部署在动态、现实世界环境中的AI智能体中使用此模式,其中可能存在系统故障、工具错误、网络问题或不可预测的输入,且运行可靠性是关键要求。
视觉摘要
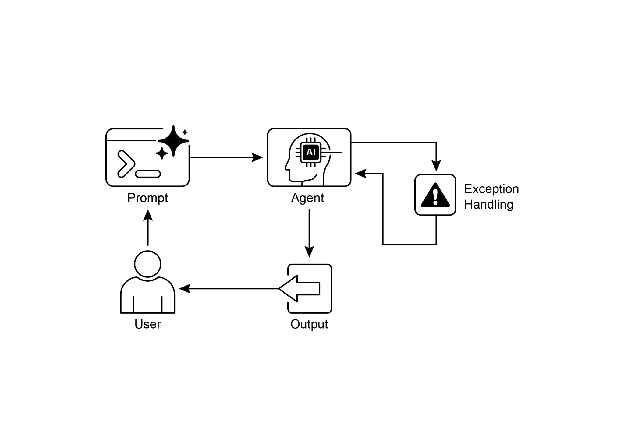
图2:异常处理模式
关键要点
必须记住的关键点:
异常处理和恢复对于构建健壮和可靠的智能体至关重要。 这种模式涉及检测错误、优雅地处理它们并实施恢复策略。 错误检测可能包括验证工具输出、检查API错误代码和使用超时。 处理策略包括日志记录、重试、回退、优雅降级和通知。 恢复侧重于通过诊断、自我修正或升级来恢复稳定运行。 此模式确保智能体即使在不可预测的真实世界环境中也能有效运作。
结论
本章探讨了异常处理和恢复模式,这对于开发稳健可靠的智能体至关重要。该模式阐述了智能体如何识别和管理意外问题,实施适当的响应,并恢复到稳定的工作状态。本章讨论了该模式的各个方面,包括错误检测、通过日志记录、重试和回退等机制处理这些错误,以及恢复智能体或系统到正常功能所使用的策略。异常处理和恢复模式在多个领域的实际应用被展示出来,以证明其在处理现实世界复杂性和潜在故障中的相关性。这些应用展示了为智能体配备异常处理能力如何有助于其在动态环境中的可靠性和适应性。
参考文献
- 麦克康奈尔,S. (2004). 《代码大全》(第2版). 微软出版社。
- 石宇,裴鹤,冯磊,张毅,姚迪. (2024). 迈向多智能体强化学习的容错性. arXiv预印本 arXiv:2412.00534.
- O'Neill, V. (2022). 利用智能迁移提高异构多智能体物联网系统的容错性和可靠性. 电子学,11(17),2724.